



Introdução
A artroplastia total do quadril é considerada uma das cirurgias de maior sucesso na história da medicina. Porém algumas complicações como luxação e soltura asséptica são descritas como causas de revisão (1).
A artroplastia de quadril com assistência robótica surgiu como uma resposta para essas preocupações. Os seus objetivos são reduzir o mal posicionamento dos componentes relacionados ao erro humano, melhorar a biomecânica da reconstrução, diminuindo a instabilidade ou impacto e alcançar resultados funcionais superiores (2).
Dependendo do nível de controle permitido ao cirurgião os sistemas de auxílio robóticos podem ser classificados como ativos e semiativos. Os sistemas ativos funcionam de forma autônoma para realizar a ressecção óssea planejada e o implante dos componentes. Um exemplo de sistema ativo é o ROBODOC (Curexo Technology Comporation, Fremont, California). Contudo esse sistema está associado a lesões inadvertidas do mecanismo abdutor e fraturas femorais. Os sintomas semiativos permitem ao cirurgião manter o controle durante a ressecção óssea e implante dos componentes, mas proporciona informações instantâneas desse posicionamento e de desvios em relação ao planejamento pré-operatório. Um exemplo de sistema semiativo é o MAKO (Stryker Ltda, Kalamazoo, Michigan, USA) (3). No momento, o sistema MAKO é o único dispositivo disponível no Brasil para realização de artroplastia de quadril com auxílio robótico. Ele traz informações táteis, visuais e sonoras para que o cirurgião execute o planejamento pré-operatório da forma mais precisa possível (4).
Vantagens
O posicionamento acetabular na zona de segurança de Lewinnek (30-50º de inclinação lateral, 5-25º de anteversão) e Callanan (30-45º de inclinação lateral e 5-25º de anteversão) é fundamental para o sucesso da artroplastia de quadril proporcionando melhor amplitude de movimento e menor incidência de luxações (5 e 6). A utilização do dispositivo robótico MAKO é superior à cirurgia convencional no posicionamento do componente acetabular dentro da zona de segurança de Lewinnek e Callann (7).
A discrepância de comprimento de membros inferiores é um problema comum relacionado à artroplastia total de quadril levando a resultados funcionais inferiores, insatisfação do paciente e processos na justiça (2). O sistema de auxílio robótico MAKO permite o controle instantâneo das mudanças no offset e no comprimento de membros inferiores resultando em reconstruções mais anatômicas (8).
Uma consideração importante na artroplastia de quadril é a preservação do estoque ósseo para favorecer uma possível revisão no futuro (2). Quando comparado à cirurgia convencional o sistema robótico MAKO utiliza componente acetabulares menores resultando em maior preservação de estoque ósseo (9).
Desvantagens
Uma desvantagem dos sistemas de auxílio robótico para artroplastia total do quadril é o custo elevado inicial do procedimento. Possíveis benefícios como diminuição da taxa de complicações e maior sobrevida do implante são relatados, mas ainda faltam trabalhos com nível de evidência alta para comprovar tais afirmações (2).
Outra desvantagem é o aumento do tempo cirúrgico em relação à cirurgia convencional, principalmente durante a curva de aprendizado do cirurgião (10).
Complicações
Estudos recentes têm mostrado resultados promissores em termos de complicações relacionadas à artroplastia total do quadril com auxílio robótico MAKO. Domb relatou apenas um problema técnico em uma série de 50 casos de artroplastia com auxílio robótico (10). Além disso foi observada menor incidência de luxação e taxas similares de infecção quando comparada à artroplastia de quadril com auxílio robótico MAKO com a técnica convencional (11)
Etapas da artroplastia de quadril com assistência robótica
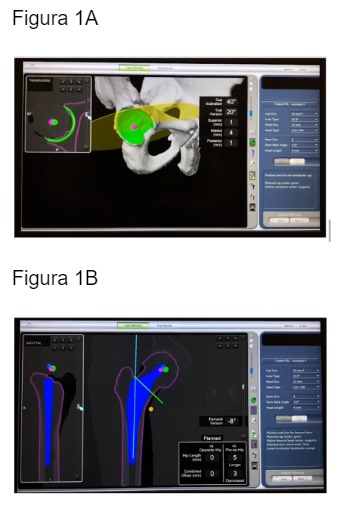
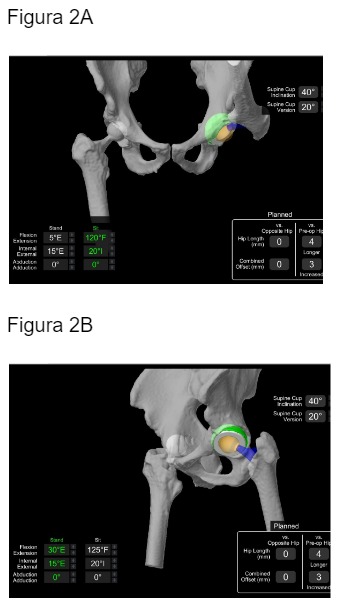
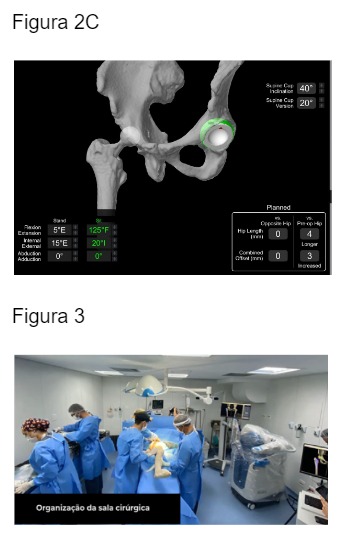
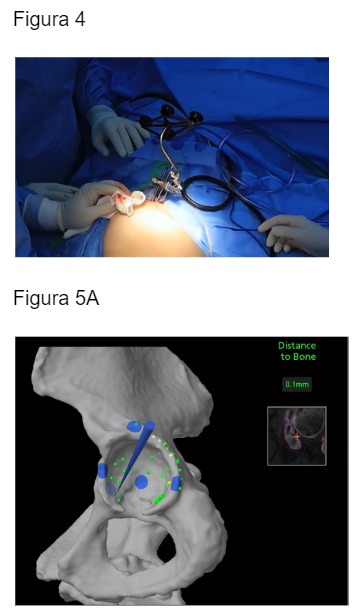
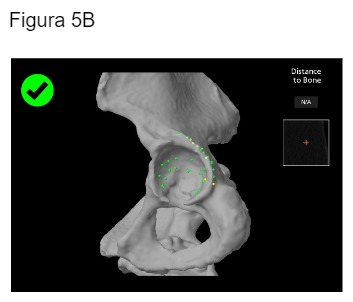
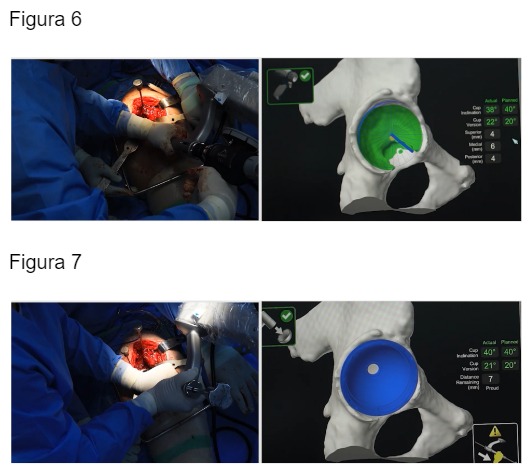
É necessária a realização de uma tomografia da bacia e do fêmur proximal com reconstrução 3D, além de uma radiografia da coluna lombar na incidência de perfil em pé e sentado com cálculo do slope sacral. Essa imagem é colocada no sistema robótico para planejamento adequado do posicionamento e tamanho dos implantes (Figura 1A e 1B). Nesse momento também é possível avaliar a amplitude de movimento projetada após a realização da cirurgia, a presença ou ausência de impacto, e se for o caso podem ser feitos todos os ajustes necessários para o melhor funcionamento da prótese de quadril (Figura 2A, 2B e 2C). No bloco cirúrgico o paciente é posicionado de acordo com a preferência do cirurgião no cetro da sala e o robô é posicionado ao seu lado (Figura 3). Os sensores da crista ilíaca são posicionados de forma percutânea para orientar o ponto fixo da pelve ao sistema de navegação (Figura 4). O acesso cirúrgico é realizado de acordo com a preferência do cirurgião, a acetábulo é exposto e a partir daí se inicia o registro ósseo para sobreposição à imagem de tomografia previamente realizada (Figura 5A e 5B). A fresagem acetabular é realizado por meio do braço robótico de acordo com o planejamento pré-operatório, assim como a impactação do componente acetabular (Figura 6 e 7). É então realizada a fresagem femoral, colocação do teste femoral, redução da prótese de aferição do resultado (Figura 8A e 8B). Se tudo estiver de acordo com o planejamento é realizada a colocação da prótese definitiva.
Conclusão
A artroplastia total do quadril com auxílio robótico MAKO utiliza imagens pré-operatórias para criação de um plano cirúrgico específico para cada paciente e um dispositivo de braço robótico para a execução do plano com o maior nível de acurácia possível. Estudos iniciais evidenciam melhor posicionamento dos componentes dentro da zona de segurança de Lewinnek e Callanann, melhor restauração do centro de rotação do quadril e melhor equalização do comprimento dos membros inferior e offset, mas os resultados funcionais de curto prazo ainda são equivalentes à cirurgia convencional. A artroplastia de quadril com auxílio robótico apresenta resultados iniciais promissores, mas estudos de longo prazo ainda se fazem necessários para avaliar adequadamente os benefícios dessa tecnologia.
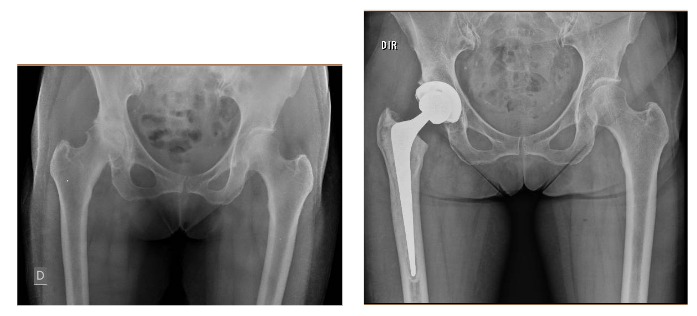
CASO CLÍNICO 1
Paciente VMF, sexo feminino, 66 anos, dor incapacitante no quadril direito secundária à coxartrose avançada, sem melhora com tratamento conservador. Optado pela artroplastia total do quadril direito com auxílio robótico MAKO. Observa-se posicionamento acetabular dentro da zona de segurança de Lewinnek e Callanann, reconstrução anatômica do offset e ausência de discrepância de comprimento dos membros inferiores.
CASO CLÍNICO 2
Paciente SPC, 72A, sexo masculino, dor incapacitante no quadril esquerdo secundária à coxartrose avançada, sem melhora com tratamento conservador. Neste caso é possível observar um colo varo bilateral e offset muito aumentado. Optado pelo tratamento por meio de artroplastia total do quadril com auxílio robótico MAKO. O resultado atingido foi de posicionamento acetabular dentro da zona de segurança de Lewinnek e Callanann, reconstrução anatômica do offset mesmo sendo muito grande e sem aumento de comprimento do membro inferior operado.

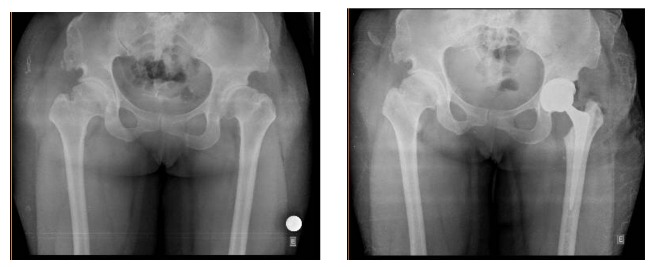
CASO CLÍNICO 3
Paciente LLS, 48 anos, sexo feminino, dor incapacitante no quadril esquerdo associado à displasia do quadril e coxartrose avançada, sem melhora com tratamento conservador. Optado por tratamento cirúrgico por meio de artroplastia total do quadril esquerdo com auxílio robótico MAKO. A radiografia final evidencia posicionamento acetabular dentro da zona de segurança de Lewinnek e Callanann, além de reconstrução de offset e comprimento de membros inferiores anatômico, mesmo na presença de grande deformidade acetabular pré-operatória.
ANEXOS

REFERÊNCIAS BIBLIOGRÁFICAS
1 – Gwam CU, Mistry JB, Mohamed NS, et al. Current epidemiology of revision THA in the United States: national inpatient sample 2009 to 2013. J Arthroplasty 2017; 32: 2088–2092.
2 – Perets I, Um BH, Mont MA et al. Current topics in robotic-assisted total hip arthroplasty: a review. Hip International. 2020 Mar;30(2):118-124.
3 – Kayani B, Konan S, Ayuob A et al. The Role of robotics in total hip arthroplasty. EFORT Open Rev. 2019 Nov 1;4(11):618-625.
4 – Tsai TY, Dimitriou D, Li JS, Kwon YM. Does haptic robot-assisted total hip arthroplasty better restore native acetabular and femoral anatomy? Int J Med Robot 2016; 12:288–295.
5 – Lewinnek GE, Lewis JL, Tarr R, et al. Dislocations after total hip-replacement arthroplasties. J Bone Joint Surg Am 1978; 60: 217–220. 18.
6 – Callanan MC, Jarrett B, Bragdon CR, et al. The John Charnley Award: risk factors for cup malpositioning: quality improvement through a joint registry at a tertiary hospital. Clin Orthop Relat Res 2011; 469: 319–329.
7 – Domb BG, Redmond JM, Louis SS, et al. Accuracy of component positioning in 1980 total hip arthroplasties: a comparative analysis by surgical technique and mode of guidance. J Arthroplasty 2015; 30: 2208–2218.
8 – Jerabek SA, Carroll K, Maratt JD, et al. Accuracy of cup positioning and achieving desired hip length and offset following robotic THA. In: Poster S18 presented at 14th annual CAOS meeting, Milan, Italy, 18–21 June 2014.
9 – Suarez-Ahedo C, Gui C, Martin TJ, et al. Robotic-arm assisted THA results in smaller acetabular cup size in relation to the femoral head size: a matched-pair controlled study. Hip Int 2017; 27: 147–152.
10 – Domb BG, El Bitar YF, Sadik AY, et al. Comparison of robotic-assisted and conventional acetabular cup placement in THA: a matched-pair controlled study. Clin Orthop Relat Res 2014; 472: 329–336.
11 – Illgen RL Nd, Bukowski BR, Abiola R, et al. Roboticassisted THA: outcomes at minimum two-year follow-up. Surg Technol Int 2017; 30: 365–372.